undefined symbol #838
Comments
|
I couldn't reproduce but it seems like you have more than one installation of ddynamic_reconfigure on your machine. realsense-viewer would not care since it's not using it. |
|
Could not find more than one install of ddynamic_reconfigure, but a complete wipe and reinstall of the system fixed the issue. |
|
I also bumped into this error and the problem was that in the steps when installing the realsense2-camera (following the .travis.yml), when you have to do: I had skipped to do the last step catkin_make install. Just in case someone else bumps into this |
|
Edit: see #838 (comment) I'm facing similar issue here, but a manual @doronhi , could you please tell me a little more about this ?? :
Thanks a lot ! |
If someone encounter this issue : I was indeed compiling in a "not clean, polluted by old build artifact which was using old librealsense version" build environment. But catkin clean is not sufficient, I had to reinstall everything from scratch, don't know why... |
|
hey im having similar issue on a intel x64 notebook PC running ubuntu 16.04 I tried to uninstall apt remove ddynamic * and download the 0.2.0 version from github. But encoutner with build error says the register function not compatiable. I searched in the header file. it was there. So i have no idea whats going on. And why it is looking for library at /devel/lib//librealsense2_camera.so: undefined symbol: why with \ ? Samething happens if i use both apt based realsense 2 and ddynamic reconfig |

|
Ok my problem solved. In my file system There is There was one unknown version of ddynamic in test_ws and it was included automatically in bashrc. remove all possible ddynamic solved it. |
If you don't mind can you please elaborate how to solve this issue? I am facing same problem. Actually I am little bit new to ROS so can you please explain in little detail how to solve this, i will be very much thankful to you. I am facing this |

i got duplicated build library. Just delete all source in the bashrc and remove all catkin_ws. THen with a clean build and src. then try to build again. This is to make sure that the library is not linked to the wrong version of supporting library ddynamic. I tried multiple version to isolate the problem in ddynamic. So for your case, if the solution i said earlier didn`t work out. You can try 43 and 42 and and default ubuntu apt install. see whats the error coming out |
Got it, Thank you so much brother |
|
I faced similar problem as following:
I solved it by adding the package "image_geometry" to CMakeLists.txt: I hope you drawing inspiration from my method! |

|
Thanks Got it. |
|
thank you, snakehaihai! my ~/.bashrc had second line of |
|
I followed the above steps , then also getting the same error here is my .bashrc |
your bashrc has no source. you didnt source the ros in /opt and didnt source the ros in the ws. follow ros install and get the following two lines inside also if you have workspace do the same |
Operating System | Ubuntu 18.04 LTS
Kernel | 4.15.0-54-generic
ROS | melodic
ROS RealSense | 2.2.6
librealsense | realsense-1.3.6
D435 Firmware | 05.11.06.250
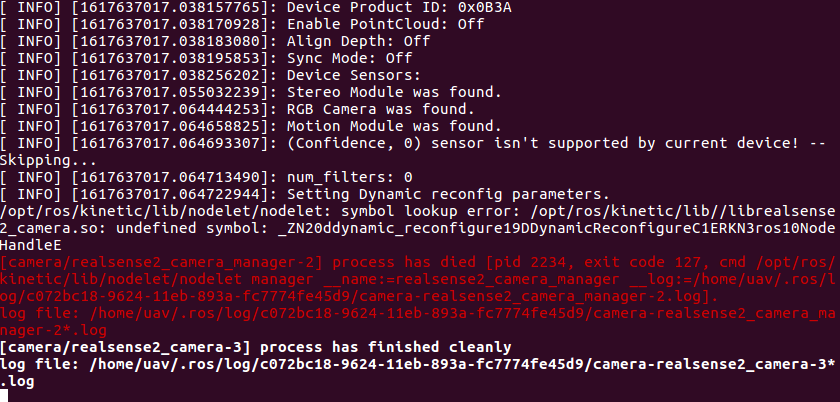
I have installed the librealsense2 packages, along with realsense-ros and ros-kinetic-ddynamic-reconfigure. Everything works correctly in realsense-viewer, but when I try to run 'roslaunch realsense2_camera rs_camera.launch', I get a symbol lookup error. I assume I have installed an incorrect version of something alone the way. Any suggestions?
The text was updated successfully, but these errors were encountered: